February 29, 2024 Basic programming concepts: 100 questions to test your knowledge One of my friends — a self-taught game programmer coming from game design — recently asked me to help him brush-up on some of…
April 11, 2023 I apologize for the confusion…ChatGPT as a coding assistant ⚠️ I do not use ChatGPT for work. For good reasons, it is prohibited where I work (porting PC games to consoles): At least…
February 20, 2023 How to debug, for game programmers (expanded) This is the 2023 update of an article first published in 2017. You can also download a PDF version of this article. The original…
August 14, 2022 Implementing and using buffers in C# You can find implementations of the data structures described here at: A buffer is a simple data structure that allows you to add any…
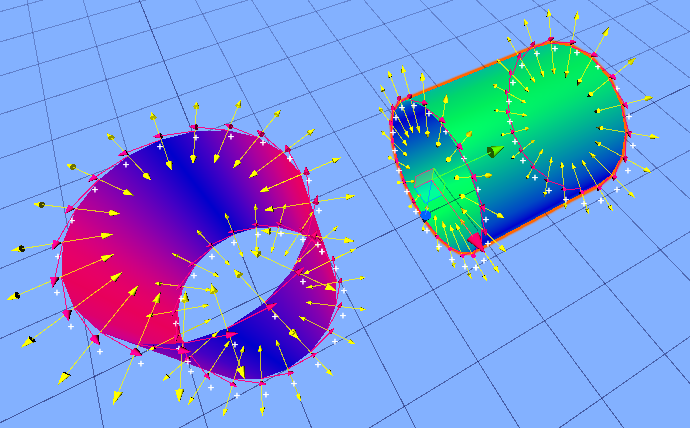
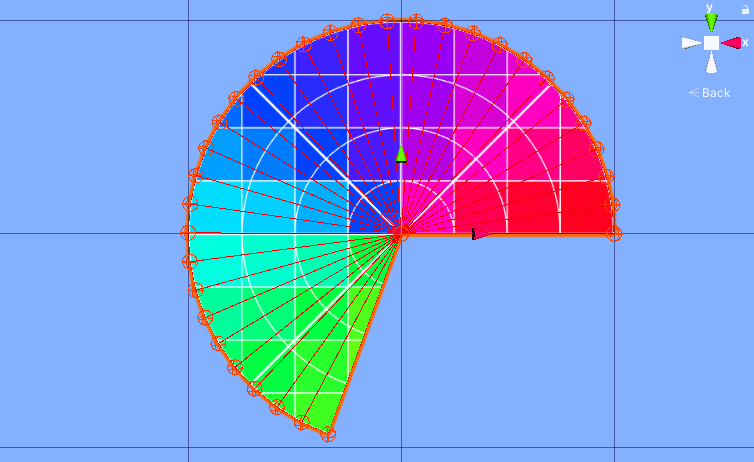
November 25, 2020 Procedural Meshes in Unity: Normals and Tangents In previous posts, we looked at general mesh generation in Unity, and the issues that arise in generating meshes for lines. In this post,…
November 16, 2020 Top game-related math books Mathematics used to be a lot more important for game development than it is now. There are so many tools available for creating all…
November 13, 2020 How to structure a game project The project structure of a game is where things are, and what they are called. Viewed broadly, it may also include decisions about what…
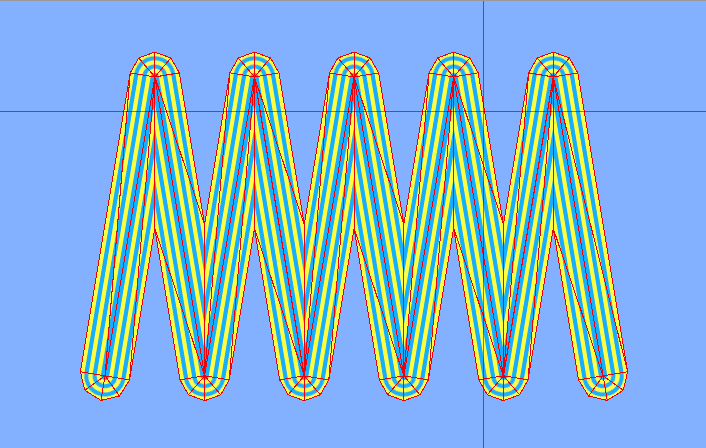
November 10, 2020 Procedural Meshes for Lines in Unity A lines is a fundamental graphics object, but generating attractive, robust lines involve many subtle issues and can be difficult to get right. In…
November 4, 2020 Generating meshes procedurally in Unity Procedurally generated meshes have several uses in game development: You can use them for crisp, non-standard UI components. You can use them to render…
June 13, 2019 10 things you didn’t know about advergames We compiled a list of about 100 advergames to use as examples to show clients, and from this, we learned quite a lot about hem. I…